Floyd图算法中的动态规划_C语言实现
Floyd
Floyd是图的经典算法,可以使用动态规划方法解决。但是真正写图搜索算法时不要用Floyd算法,因为它比Dijkstra较慢。但是Floyd对于算法思想的启发很有研究价值。实用价值、研究价值要辩证看。
图
和树一样,有好多节点,但没有树的规律。树是图的子集。
-
节点和节点之间可以是连通的也可以是不连通的。
-
连通的线如果没有方向则称之为无向图,如果有方向则为有向图。
-
如果有循环,则是有环图;如果没有循环则是无环图。
-
节点的出度:离开这个节点的线的个数;
-
节点的入度:进入这个节点的线的个数。
应用:地图算法,搜索、寻路;软件工程中Element Block利用有向无环图进行拓扑排序,根据依赖关系、前置关系进行排序。但是还是没有树的应用范围广。
网络路由选择:OSPF(开放式最短路径优先)中就用到了Dijkstra算法。配置路由表。
术语
- 逆时针:CCW (Counter Clock Wise)
- 顺时针:CW (Clock Wise)
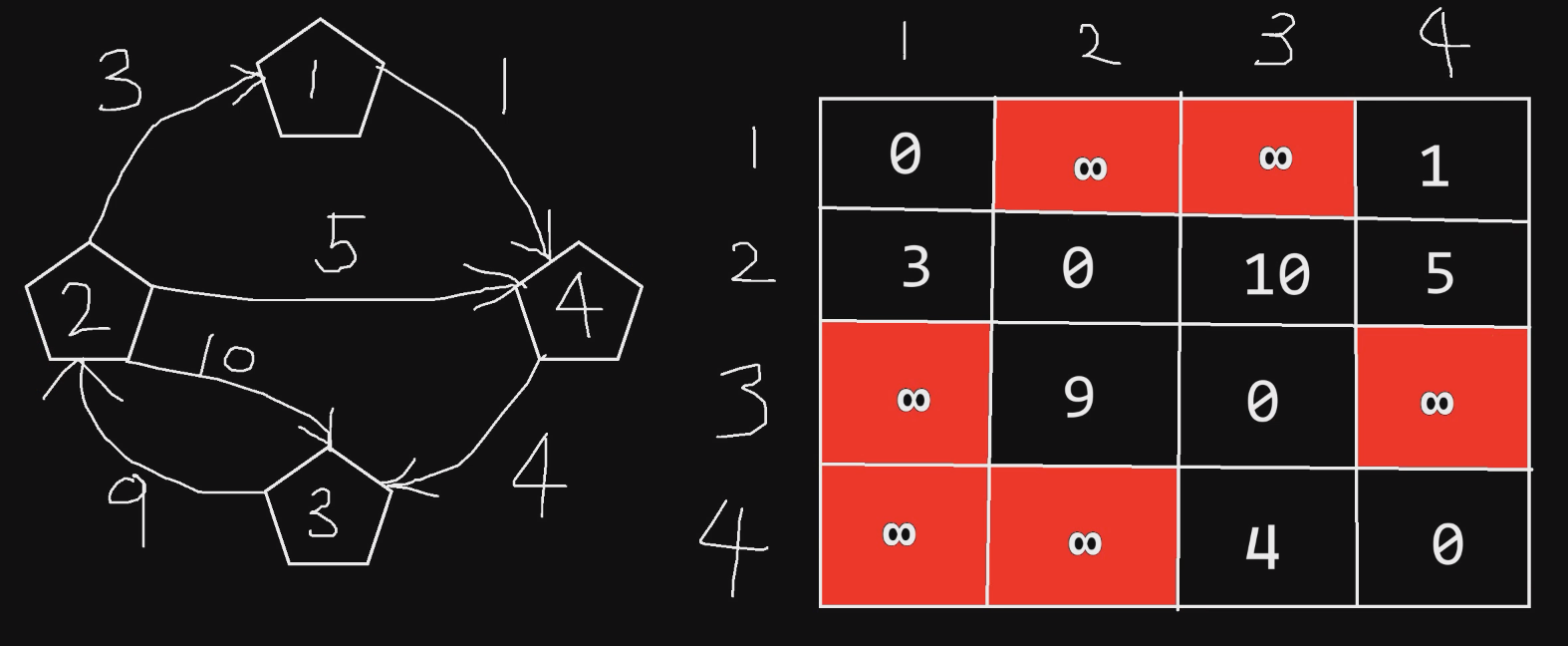
计算机处理图实际的数据结构
Floyd - 动态规划思想
从某一点到某一点,选择通路,求最短的路径长度。
第一个参数是始发节点,第二个参数是目的节点。第三个参数是可以参与的节点范围(如果是4,则表示1、2、3、4节点全都可以参与),如果是0的话,表示没有中间节点参与。
比如说:floyd(from, to, n)表示:从节点from走到节点to,节点1到n可以参与。求最短路径长度。
运用背包问题的思想。
1 | floyd(from, to, n) |
递归法
如果不选择节点n,则from到to还需在剩下的n-1节点中走。
如果选择节点n,则问题分解成了from到节点n(确定走n,所以可以少走最后的一个节点,因此是n-1),加上剩下的n到to,需要在n-1个节点中走(因为已经到达了节点n,因此可以少走1个)(至于后半段的节点数为什么不是1?要正确理解参数3的意思,指的是可参与的节点,并不是说必须走n个(多于、少于n都可以))。
1 | int path[5][5] = { |
测试
1 | int floyd_recur(int from, int to, int n); |
复杂度分析
递归方法的时间复杂度:
迭代法
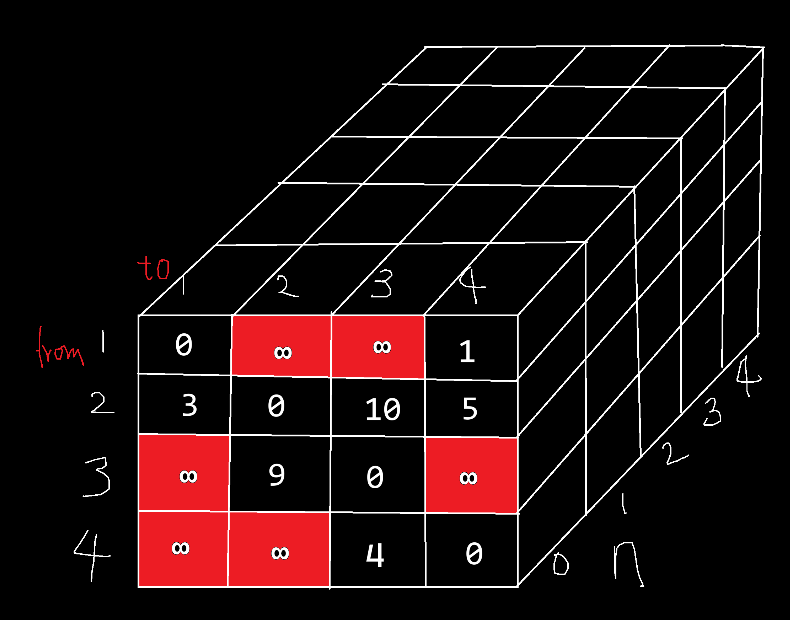
因为有三个参数,所以需要三维数组来进行迭代。的有效取值范围为,0代表没有节点参与。而和的有效取值范围为,即0是多余的,数组给出多余的1行1列只是为了方便编程。
1 | int shortpath[5][5][5]; |
复杂度分析
各种图算法
BFS、DFS、Dijkstra、Bellman-Ford(BF)、Floyd、Prim和Kruskal 等算法是图论和搜索领域中的核心算法,它们各有用途、适用场景和特性。在面试中,通常会从算法的原理、适用场景、时间复杂度、空间复杂度、以及一些优化细节来考查。因此,了解它们的关联与区别是非常重要的。
- 遍历算法
- DFS
- BFS
- 最短路径算法
- Dijkstra(好)
- Bellman-Ford(好、使用领域广泛,但是最坏性能差)
- Floyd(性能不好)
- 拓扑排序
- 最小生成树算法(连通图的子图)
- Prim(不好)
- Kruskal(好)
1. 广度(BFS)和深度优先搜索(DFS)
关联
- BFS和DFS都是图搜索算法,用于遍历或搜索图的节点。
- 两者都可以用于无向图和有向图,能够找到可达性,即从一个节点到其他节点的路径。
区别
- BFS:逐层扩展节点,适合寻找最短路径(无权图)。
- DFS:沿路径深入搜索,适合找到所有路径或用于图的拓扑排序和强连通分量等应用。
关键点
- 时间复杂度:O(V + E),其中V是节点数,E是边数。
- 应用场景:BFS常用于无权最短路径、迷宫等问题;DFS常用于路径搜索、连通分量检测等。
2. Dijkstra算法
关联
- Dijkstra是单源最短路径算法,与BFS类似,都用于路径搜索,但适用于带权图。
- 与Bellman-Ford的区别在于它不能处理负权边。
关键点
- 时间复杂度:(使用优先队列)。
- 适用场景:地图导航、网络路由(OSPF)、带权路径问题。
- 限制:不能处理负权边。面试中可能会询问原因,重点在于算法的贪心性质。
与Floyd算法相比
当我们主要用于搜索图时(搜索单源路径),尽量用Dijkstra算法,因为Floyd太耗时了。
3. Bellman-Ford算法
关联
- 与Dijkstra一样,Bellman-Ford也用于单源最短路径。
- Bellman-Ford与Dijkstra的不同之处在于它可以处理负权边,且可以检测负权环。
关键点
- 时间复杂度:O(V * E)。
- 适用场景:处理负权边的路径问题,如金融图表中的盈亏边。
- 特点:可以检测负权环。面试中可能会问到与Dijkstra的区别以及负权环检测方法。
4. Floyd算法
关联
- Floyd用于多源最短路径问题,与Bellman-Ford和Dijkstra不同,它直接求解图中任意两点间的最短路径。
- 与Prim和Kruskal不同,它不用于生成树,而是直接在邻接矩阵上处理所有对路径的情况。
关键点
- 时间复杂度:O(V^3)。
- 适用场景:计算稠密图中所有节点对的最短路径,尤其是对小规模图的处理。
- 优缺点:算法简单但复杂度较高;适用于小图。面试中可能会问到Floyd的实现及其适用范围。
5. Prim算法和Kruskal算法
关联
- Prim和Kruskal都是最小生成树(MST)算法,通常用于无向图。
- 它们都是贪心算法,通过不同的方法来构造最小生成树。
区别
- Prim:逐步扩展生成树的节点,适合稠密图。
- Kruskal:通过选择最小的边逐步合并生成树,适合稀疏图。
关键点
- 时间复杂度:Prim为O(E log V)(堆优化),Kruskal为O(E log E)。
- 适用场景:网络设计、最小代价连接等。
- 优缺点:Prim对稠密图较好,Kruskal对稀疏图较好。面试中常问到如何实现Union-Find(用于Kruskal中的连通性检测)。
总结与面试中的关键考查点
- 算法适用场景:每种算法都有特定的应用场景,面试中可能会考查候选人能否识别何时使用BFS、DFS、Dijkstra、Floyd或MST算法。
- 算法的优化和复杂度:了解时间和空间复杂度,尤其是如何优化(如Dijkstra的优先队列优化,Kruskal的Union-Find等),可以帮助在面试中展示优化思维。
- 差异点:
- Dijkstra与Bellman-Ford的差异:特别在处理负权边的能力上。
- Prim与Kruskal:适用图密度的不同,考查对图结构的理解。
- 多源最短路径(Floyd)与单源最短路径(Dijkstra、Bellman-Ford)的区别,考查对路径搜索的理解。
- 细节实现和边界情况:面试中可能会问到实现细节和一些边界情况,比如:
- Dijkstra的贪心限制,无法处理负权边。
- Bellman-Ford如何检测负权环。
- Union-Find在Kruskal中的应用及优化。
Union-Find 并查集
Union-Find(联合-查找)是一种用于处理动态连通性问题的数据结构,通常用于图的连通性检测、最小生成树(如Kruskal算法中的使用)、网络连接问题等。
主要功能
Union-Find 数据结构主要提供两个操作:
- Find(查找):用于查找某个元素所在的集合(也可以理解为查找某个元素的代表元素或根节点)。
- Union(合并):将两个元素所属的集合合并成一个集合。
这两个操作支持高效的动态连接操作,适用于处理图的连通性问题。例如,判断图中两个节点是否在同一连通分量中,或合并两个节点所属的连通分量。
数据结构实现
Union-Find 使用一棵树来表示每个集合的结构。每个节点指向一个父节点,根节点代表整个集合。通过路径压缩和按秩合并(按大小合并)这两种技术,可以使操作的时间复杂度接近常数时间(,其中α是反阿克曼函数,是非常慢增长的)。
Find 操作
- 目标:查找一个元素属于哪个集合。即找到该元素的根节点。
- 路径压缩:为了优化后续查询,我们将路径中的所有节点都直接连接到根节点上,使得树更平衡,从而提高效率。
1 | int find(int x) |
Union操作
-
目标:将两个元素合并到同一个集合中。
-
按秩合并(Union by Rank/Size):将树小的根节点连接到大的根节点,保持树的平衡,避免树变得过高。
1 | void union(int x, int y) |
时间复杂度
- Find 和 Union 的时间复杂度是接近 O(α(n)),其中 α(n) 是反阿克曼函数,它增长非常慢,实际上几乎可以认为是常数时间(对于实际应用,α(n) 小于 5 即可)。
- 因此,Union-Find 数据结构非常高效,适用于处理大规模的连通性问题。
应用场景
- 判断两个元素是否在同一个集合中:比如判断图中的两个节点是否连通。
- 最小生成树:Kruskal 算法中用于判断两条边是否连接在同一个连通分量中,若是,则跳过;若不是,则合并两个分量。
- 网络连接问题:如社交网络中的朋友关系,或者计算机网络中设备的连通性。
- 动态连通性:例如实时地在网络中查询两个节点是否连通,并合并它们的连接。
例子
假设有一个图,节点为 0, 1, 2, 3,边为 (0,1), (1,2), (2,3),我们可以用 Union-Find 来检测这些节点是否在同一个连通分量内,并且合并这些连通分量。
1 |
|
关键特性
- 路径压缩:使得树更加扁平化,提高查询效率。
- 按秩合并:合并两个集合时,保持树的平衡,减少树的高度,进一步优化性能。
面试中可能的考点
- Union-Find的基本原理,尤其是如何实现
Find和Union操作。 - 路径压缩和按秩合并的优化思路及其时间复杂度。
- 在图算法中(特别是Kruskal算法)如何利用Union-Find来解决连通性问题。
- 处理动态连通性时的常见问题,如如何动态添加边、合并不同的子图等。
总之,Union-Find 是一种非常高效的解决动态连通性问题的数据结构,是图论问题中不可或缺的工具之一,特别在处理大规模图的场景中表现尤为突出。