内容
- 线程安全的定义
- 对象的创建
- 对象的销毁
- 线程安全的Observer
- 解决方案
- 陷阱
线程安全的定义
依据[JCP],一个线程安全的class应当满足以下三个条件:
- 多个线程同时访问时,其表现出正确的行为。
- 无论操作系统如何调度这些线程,无论这些线程的执行顺序如何交织。
- 调用端代码无须额外的同步或其他协调动作。
依据这个定义,C++标准库里的大多数class都不是线程安全的,包括std::string、std::vector、std::map等。这些class通常需要在外部加锁才能供多个线程同时访问。
以Counter为例说明问题
1 | class Counter : boost::nocopyable |
这个class很直白,一看就明白,也容易验证它是线程安全的。每个Counter对象有自己的mutex_,因此不同对象之间不构成锁争用(lock contention)。如果是同一个Counter对象则不可同时访问value_++。
注意到,其mutex_成员是mutable的,意味着const成员函数如Counter::value()也能直接使用non-const的mutex_。
尽管这个Counter毫无疑问是线程安全的,但是如果Counter是动态创建的,并通过指针来访问,则对象销毁的**竞态条件(race condition)**仍然存在。
当析构函数遇到多线程
与其他面向对象语言不同,Cpp要求程序员自己管理对象的生命期,这在多线程环境下显得尤为困难。
当一个对象能被多个线程同时看到时,那么对象的销毁时机就变得模糊不清,可能出现多种竞态条件。
- 在即将析构一个对象时,从何而知此刻是否有别的线程正在执行该对象的成员函数?
- 如何保证在执行成员函数期间,对象不会在另一个线程被析构?
- 在调用某个对象的成员函数之前,如何得知这个对象还活着?它的析构函数会不会碰巧执行到一半?
这些竞态条件问题是C++多线程编程面临的基本问题。
对象的创建
对象构造要做到线程安全,唯一的要求是在构造期间不要给其他对象泄露this指针(其自身创建的子对象除外)。即:
- 不要在构造函数中注册任何回调;
- 不要在构造函数中把this传给跨线程的对象;
- 即便在构造函数的最后一行也不行。
之所以这样规定,是因为在构造函数执行期间,对象还没有完成初始化工作,如果这时this泄露给了其他对象(其自身创建的子对象除外),那么别的线程有可能访问这个半成品对象,这会造成难以预料的后果。
1 |
|
1 | /* 错误 */ |
1 | /* 正确 */ |
二段式构造——即构造函数+initialize()——有时会是好办法,这虽然不符合C++教条,但是多线程下别无选择。
另外,既然允许二段式构造,那么构造函数不必主动抛异常,调用方靠initialize()的返回值来判断对象是否构造成功,这能简化错误处理。
即使是构造函数的最后一行,也不要泄露this指针,因为Foo有可能是个基类,基类先于派生类构造,执行完Foo::Foo()的最后一行代码还会继续执行派生类的构造函数,这时most-derived class的对象还处于构造中,仍然不安全。
对象的销毁
对象的析构,在单线程里不构成问题,最多需要注意避免空悬指针和野指针。
而在多线程程序中,存在了太多的竞态条件。对一般成员函数而言,做到线程安全的办法是让它们顺次执行,而不要并发执行(关键是不要同时读写共享状态),也就是让每个成员函数的临界区不重叠。这是显而易见的,不过有一个隐含条件或许不是每个人都能立刻想到:成员函数用来保护临界区的互斥器本身必须是有效的。而析构函数破坏了这一假设,它会把mutex成员变量销毁掉。悲剧啊!
- mutex不是办法。
mutex只能保证函数一个接一个地执行,考虑下面两个代码(并行),它试图用互斥锁来保护析构函数:

此时,有A、B两个线程都能看到Foo对象x,线程A即将销毁x,而线程B正准备调用x->update()。

尽管线程A在销毁对象之后把指针置为了NULL,尽管线程B在调用x的成员函数之前检查了指针x的值,但还是无法避免一种竞态条件:
- 线程A执行到了析构函数的
(1)处,已经持有了互斥锁,即将继续往下执行。 - 线程B通过了
if(x)检测,阻塞在(2)处。
接下来会发生什么,只有天晓得。因为析构函数会把mutex_销毁,那么(2)处有可能永远阻塞下去,有可能进入“临界区”,然后core dump,或者发生其他更糟糕的情况。
这个例子至少说明delete对象之后把指针置为NULL根本没用,如果一个程序要靠这个来防止二次释放,说明代码逻辑出了问题。
- 作为数据成员的mutex不能保护析构
前面的例子说明,作为class数据成员的MutexLock只能用于同步本class的其他数据成员的读和写,它不能保护安全地析构。因为MutexLock成员的生命期最多与对象一样长,而析构动作可说是发生在对象死亡之后(或者说死亡之时)。另外,对于基类对象,调用到基类析构函数的时候,派生类对象的那部分已经析构完毕了,那么基类对象拥有的MutexLock不能保护整个析构过程。
其实,析构过程本来也不需要保护,因为只有别的线程都访问不到这个对象时,析构才是安全的,否则会有竞态条件发生。
死锁
如果要同时读写一个class的两个对象,有潜在的死锁可能。比方说有swap()这个函数。
1 | void swap(Counter & a, Counter & b) |
如果线程A执行swap(a, b);而同时线程B执行swap(b, a);,就有可能死锁。operator=()也是类似的道理。
1 | Counter& Counter::operator=(const Counter& rhs) |
一个函数如果要锁住相同类型的多个对象,为了保证始终按相同的顺序加锁,我们可以比较mutex对象的地址,始终先加锁地址较小的mutex。???
线程安全的Observer
一个动态创建的对象是否还活着,光看指针(或引用)看不出来。指针就是指向了一块内存,这块内存上的对象如果已经销毁,那么根本就不能访问(就像free(3)之后的地址不能访问一样),既然不能访问又如何知道对象的状态?换句话说,没有高效的办法判断一个指针是否是合法指针,这是C/C++指针问题的根源。(万一原址又创建了一个新的对象呢?再万一这个新的对象的类型异于老的对象呢?)
对象之间关系的三种主要类型
composition(组合/复合)、aggregation(聚合)、association(关联)。
- 组合关系
组合关系在多线程里不会遇到什么麻烦,因为对象x的生命期由其唯一的拥有者owner控制,owner析构的时候会把x也析构掉。从形式上看,x是owner的直接数据成员,或者scoped_ptr/unique_ptr成员,抑或owner持有的容器的元素。
后两种关系在C++里比较难办,处理不好就会造成内存泄露或者重复释放。
- 关联关系
关联是一种很宽泛的关系,它表示一个对象a用到了另一个对象b,调用了后者的成员函数。从代码形式上看,a持有b的指针或引用,但是b的生命期不由a单独控制。
- 聚合关系
聚合关系从形式上看与关联关系相同,除了a和b有逻辑上的整体与部分的关系。如果b是动态创建的并在整个程序结束前有可能被释放,那么就会出现前文提到的竞态条件。
如何避免访问失效对象
似乎有一个简单的解决方法:只创建不销毁。程序使用一个对象池来暂存用过的对象,下次申请新对象时,如果对象池里有存货就拿一个利用,否则就新建一个;对象用完之后不是直接释放掉而是放回池子里。这个办法虽然有很多缺点,但是却能避免访问失效对象的情况发生。
缺点和问题:
- 对象池的线程安全,如何安全地、完整地把对象放回池子里,防止出现“部分放回”的竞态?(线程A任务对象x已经放回了,而线程B以为对象x还活着。)
- 全局共享数据引发的lock contention,这个集中化的对象池可能会把多线程并发操作退化为串行。
- 如果共享对象的类型不止一种,那么是重复实现对象池还是使用类模板呢?
- 会不会造成内存泄漏与分片?因为对象池占用的内存只增不减,而且多个对象池不能共享内存。
Observer模式
回到正题上来,如果对象x注册了任何非静态成员函数回调,那么必然在某处持有了指向x的指针,这就暴露在了竞态条件下。
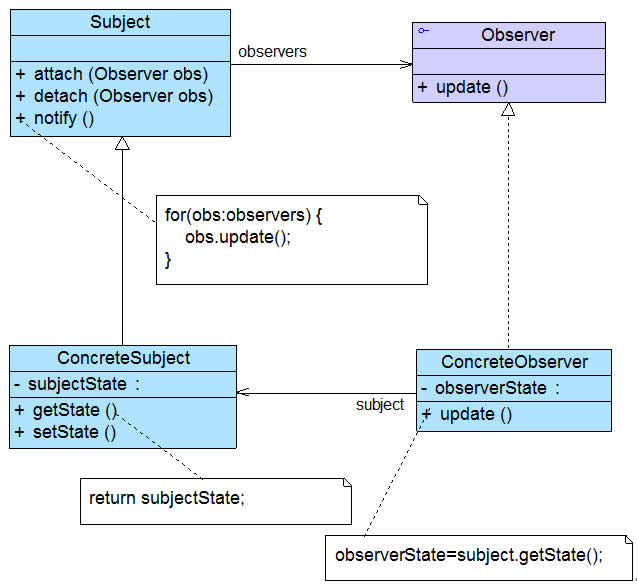
一个典型的场景是Observer模式。
1 | /* 观察者 */ |
当Observable通知每一个Observer时(x->update();),它从何得知Observer对象x还活着?要不试试在Observer的析构函数里调用unregister()来解注册?恐难奏效。
1 | class Observer //: boost::noncopyable |
我们试着让Observer的析构函数去调用unregister(this),这里有两个竞态条件。其一:subject_->unregister(this)中如何得知subject_还活着?其二:就算subject_指向某个永久存在的对象,那么还是险象环生:
- 线程A执行到
subject_->unregister(this)之前,还没有来得及unregister本对象。 - 线程B执行到
x->update();,x正好指向是subject_->unregister(this)正在析构的对象。
这时悲剧又发生了,既然x所指的Observer对象正在析构,调用它的任何非静态成员函数都是不安全的,何况是虚函数(C++标准对在构造函数和析构函数中调用虚函数的行为有明确规定,但是没有考虑并发调用的情况。)。更糟糕的是,Observer是个基类,执行到subject_->unregister(this)时,派生类对象已经析构掉了,这时候整个对象处于将死未死的状态,core dump恐怕是最幸运的结果。
这些竞态条件似乎可以通过加锁来解决,但在哪儿加锁?谁持有这些互斥锁?似乎不是那么显而易见。要是有一个活着的对象能帮帮我们就好了,这个对象需要提供一个isAlive()之类的程序函数,告诉我们某个对象还在不在。可惜指针和引用都不是对象,它们是内建类型。(这时候就要引出来智能指针了)
不要使用原始指针
指向对象的原始指针(raw pointer)是坏的,尤其当暴露给别的线程时。Observable应当保存的不是原始的Observer*,而是一个能够分辨Observer对象是否存活的东西。类似地,如果Observer要在析构函数里解注册(这虽然不能解决前面提到的竞态条件,但是在析构函数中打扫战场还是应该的),那么subject_的类型也不能是原始的Observable*(因为解注册用到了Obervable,它的unregister成员函数)。
可以使用引用计数型智能指针,即shared_ptr。用一层间接性(二级指针)保证了避免释放空悬指针,也通过引用计数解决了释放对象期间的竞态条件问题。
一个万能的解决方案
引如另外一层间接性,用对象来管理共享资源,亦即handle/body惯用技法。用标准库中的一对“神兵利器”可助我们完美解决原始指针的问题。
即share_ptr+weak_ptr。
shared_ptr控制对象的生命期。shared_ptr是强引用(想象成用铁丝绑住堆上的对象),只要有一个指向x对象的shared_ptr存在,该x对象就不会析构。- 当指向对象x的最后一个
shared_ptr析构或reset()的时候,x保证会被销毁。
weak_ptr不控制对象的生命期,但是它知道对象是否还活着(想象成用棉线轻轻拴住堆上的对象)。- 如果对象还活着,那么它可以提升为有效的
shared_ptr; - 如果对象已经死了,提升会失败,返回一个空的
shared_ptr。提升lock()行为是线程安全的。
- 如果对象还活着,那么它可以提升为有效的
shared_ptr/weak_ptr的“计数”在主流平台上是原子操作,没有用锁,性能不俗。shared_ptr/weak_ptr的线程安全级别与std::string和STL容器一样。
孟岩在《垃圾收集机制批判》中一针见血地点出智能指针的优势:“C++利用智能指针达成的效果是:一旦某对象不再被引用,系统刻不容缓,立刻回收内存。这通常发生在关键任务完成后的清理时期,不会影响关键任务的实时性,同时,内存里所有的对象都是有用的,绝对没有垃圾空占内存。”
C++的内存问题很容易解决
C++里可能出现的内存问题大致有这么几个方面:
- 缓冲区溢出(buffer overrun)
- 空悬指针/野指针
- 重复释放(double delete)
- 内存泄漏(memory leak)
- 不配对的
new[]/delete - 内存碎片(memory fragmentation)
在这几种错误里边,内存泄漏的危害相对较小,因为它只是借了东西不还,程序功能在一段时间内还算正常;而其他如缓冲区溢出或重复释放等致命错误可能会造成安全性(security和data safety)方面的严重后果。
正确使用智能指针能很轻易地解决前面5个问题。解决第6个问题——内存碎片需要别的思路。
- 缓冲区溢出
- 用
std::vector<char>/std::string或自己编写Buffer class来管理缓冲区,自动记住用缓冲区的长度,并通过成员函数而不是裸指针来修改缓冲区。
- 用
- 空悬指针/野指针
- 用
shared_ptr/weak_ptr
- 用
- 重复释放
- 用
scoped_ptr,只在对象析构的时候释放一次。
- 用
- 内存泄漏
- 用
scoped_ptr,对象析构的时候自动释放内存。
- 用
- 不配对的
new[]/delete- 把
new[]统统替换为std::vector/scoped_array。
- 把
注意:scoped_ptr、shared_ptr、weak_ptr都是值语义。要么是栈上对象,或是其他对象的直接数据成员,或是标准库容器里的元素,即不会出现下面这种形式:shared_ptr<Foo>* pFoo = new shared_ptr<Foo>(new Foo);
现代的C++程序中一般不要出现delete语句,资源(包括复杂对象本身)都要通过对象(智能指针或容器)来管理,不要让程序员还要为此操心。
应用到Observer上
Observer模式的竞态条件的核心问题是被观察者如何探查观察者的生死,可以通过weak_ptr解决,只要让Observable保存weak_ptr<Observer>即可。
1 | class Observable |
经过把Observer*替换为weak_ptr<Observer>,部分解决了Observer模式的线程安全问题,但还有以下疑点。
- 侵入性
- 强制要求
Observer必须以shared_ptr来管理
- 强制要求
- 不是完全线程安全
- 锁争用(lock contention)
- 即
Observable的三个成员函数都用了互斥器来同步,这会造成register_
- 即